Mini-radars for a smart environment
Millimeter-wave radars are sensors that use radio waves with a very short wavelength (1 to 10mm; frequency band 30 to 300 GHz) to detect objects. They are currently used in more expensive cars to assist with parking and to detect pedestrians and other vehicles, as well as to help prevent collisions. The number of radars used in cars will increase enormously in the years ahead as self-driving cars come on to the roads. The major advantage that radar has over cameras is that radar keeps working in poor (weather) conditions such as fog, dust, snow, excessive glare, etc.
Car radars use the 79GHz frequency band. Other frequency bands are also possible (e.g. 60 and 140 GHz) and these bands make new applications possible, such as presence/motion detection in buildings (for controlling lighting and climate). In these cases, the radars are more precise than current motion detectors, plus they are more ‘discreet’ than cameras. The advantage of a higher signal frequency – such as 140 GHz – is that the radar can be made even smaller and more sensitive.
Building radar devices into cars and walls may seem fairly logical, but in principle radar can be built into anything: into a baby’s crib, for instance, to check on breathing; into a cycle track to measure the speed, position on the track, etc. of the riders; into a hairdryer to record the dryer’s distance from the head and automatically adjust the heat accordingly; into drones to assist better navigation; into TV screens and computers for gesture recognition, etc.
But to make these scenarios possible, today’s radar units will have to change: they will need to be much smaller, more economical to run and cheaper to produce and buy. And – and this is not unimportant – their resolution will need to improve. “Resolution” indicates how well a radar unit is able to distinguish between two objects. Ultimately, radar will become so good that it will be able to distinguish a person on foot from a cyclist, and perhaps even be able to recognize individuals by their gait. This last point is of particular interest for controlling automated devices in homes and offices.
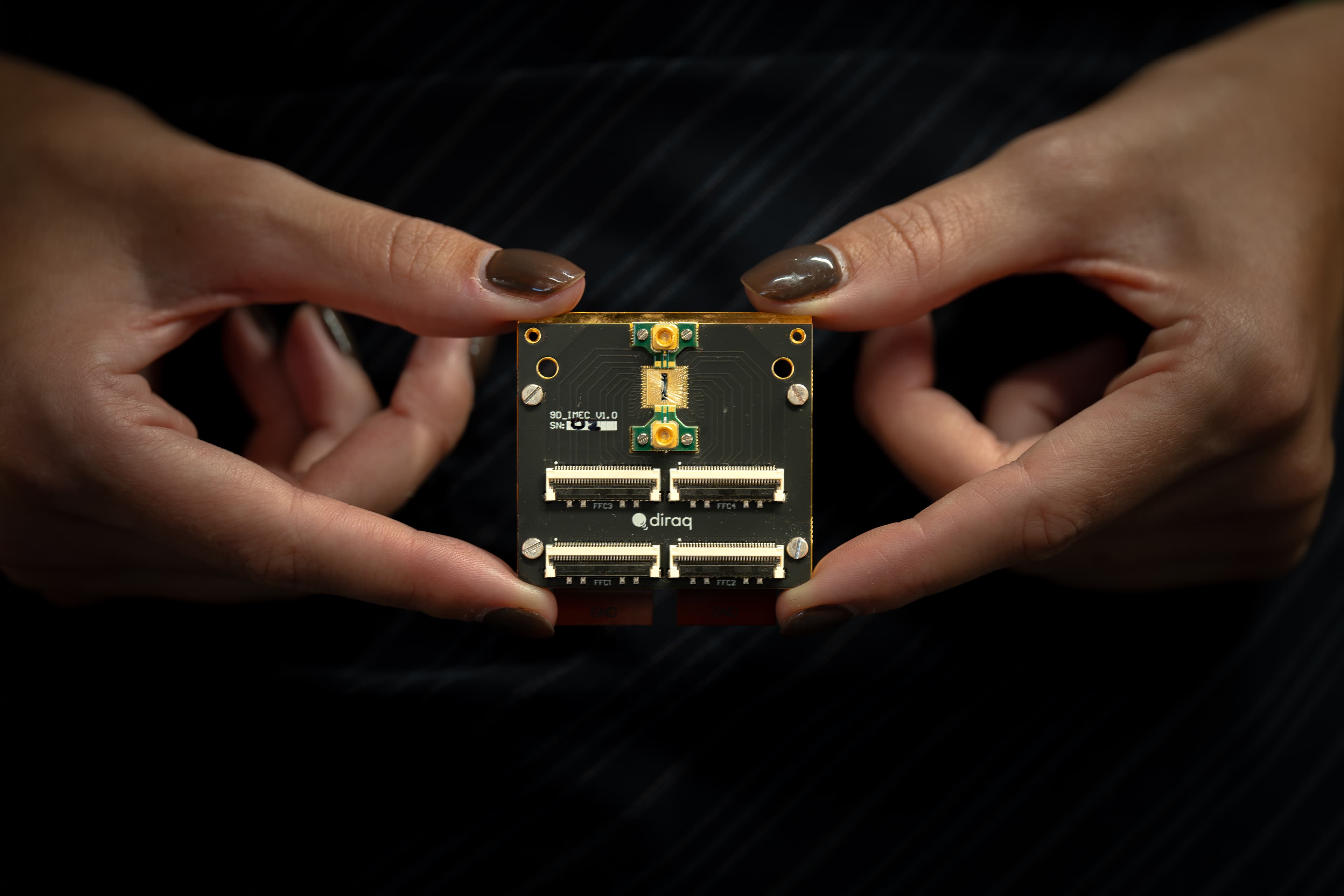
Radars are evolving into ultra-small systems that can be built into anything, anywhere.
These 3 ingredients made the first radar-on-chip < 1 cm² possible
1. CMOS. Today’s radars are based mainly on SiGe technology. Switching to CMOS technology – standard chip technology – could be the key to producing compact, economical and cheaper radar modules. If digital CMOS technology is used, it becomes possible to increase the performance of analog blocks through intensive calibration and control, while at the same time incorporating signal-processing and algorithms into a single system on chip (SoC). In 2012, imec – specialist in CMOS technology – began developing radar technology based on 28nm CMOS technology. Imec began by developing a transmitter (in 2013) and a transceiver (in 2014). It has now produced a complete system-on-chip (SoC) with antennas integrated into the packaging. This SoC contains two 79GHz transmitters, two receivers, a PLL, ADCs and digital signal-processing in the form of correlators and accumulators.
2. PMCW. Simple radar devices are based on sending out short high-power pulses. This cannot be done efficiently using CMOS technology. For that reason, it is better to opt for ‘continuous wave’ technology. Most radar units today are FMCW (frequency modulated continuous wave) devices in which a frequency sweep is transmitted with a bandwidth of 100MHz, for example. This hits the target and bounces back. Based on the offset of the frequency, the distance from the target to the radar can then be measured. The disadvantage of this technique is that for high resolution, you also need high bandwidth – and achieving a linear sweep over that high bandwidth is difficult.
Imec has opted for a different technology: PMCW, or phase modulated continuous wave (supplemented by spillover cancellation). With PMCW, a binary signal is sent out. The signal that comes back is correlated with offset signals – rather like the way a GPS works. The main advantage of this technique is that the more efficient coding technology makes it possible to use numerous antennas at the same time, which in turn creates radar with greater resolution.

Principle of phase modulated continuous wave (PMCW) radar
3. MIMO. Achieving higher angle accuracy in a radar unit is possible by implementing more antennas. Just as cameras become better when the number of pixels increases, so radar can distinguish objects better from each other if more antennas are used. In radar terms, this is called MIMO (multiple input multiple output) performance.
As a result, using PMCW is essential from a system point of view, because it enables the antennas to be coded differently. This means that using a limited number of transmitters and receivers, a large virtual antenna array can be constructed, with high angle accuracy. CMOS technology is the ideal platform for achieving this, while at the same time ensuring that the total surface area, costs and power used remain limited.
Smarter radar thanks to image-processing algorithms and sensor fusion
Another essential feature for the radar units of the future is advanced, smart signal-processing. This means that the signal bounced back to the device will not only contain information about the positions of the objects in the surrounding area, but also about their movements. This ‘micro-Doppler’ information makes it possible to distinguish walkers from joggers, bicycles or pets. Ultimately, it should also be possible to use it to distinguish people from each other. That way, a car would be able to identify its driver and allow access to the vehicle based on the radar information.
To make this micro-Doppler information accessible, algorithms are used for pattern recognition and automatic learning; algorithms that are currently used mainly in image-processing. Hence the radar will learn to recognize the micro-Doppler signature of individual objects and distinguish between them. At a subsequent stage, the signals of several radar units will be combined so that a full 360º picture can be created of what is going on around a car.
And finally, to make the image even more complete and smarter, the information will be combined with other data, such as from cameras or ultrasound sensors. Each type of sensor has its own coverage and the sensor provides unique information within that area. This means that image-sensors are better for recognizing road-markings or traffic signs. The ultimate aim is to achieve ‘sensor fusion’.
28nm CMOS 79GHz radar-on-chip
Imec researchers have succeeded in using these three principles to produce a fully integrated radar-on-chip with phase modulation and MIMO antennas. The radar chip is made up of two transmitters, two receivers and a millimeter-wave generator. The output of the receivers is digitized by on-chip ADCs and processed by a specially developed core. The radar chip consumes just 1 Watt of power to produce 7.5cm range resolution. A module with one IC and 2x2 antennas in MIMO mode produces an angle accuracy of 5° with ± 60° coverage in both azimuth and elevation. A 4x4 MIMO system with a 2 times better resolution has also been demonstrated by combining two twee systems-on-chip in a single module.

From left to right: chip with building blocks indicated, reverse side of the radar module with two system-on-chips, front of the radar module with 4x4 ntegrated antennas.

Demonstration of a 28nm CMOS 79GHz radar-on-chip with readings of distance and velocity (left) and MIMO antennas (right).